Event Camera Preliminary
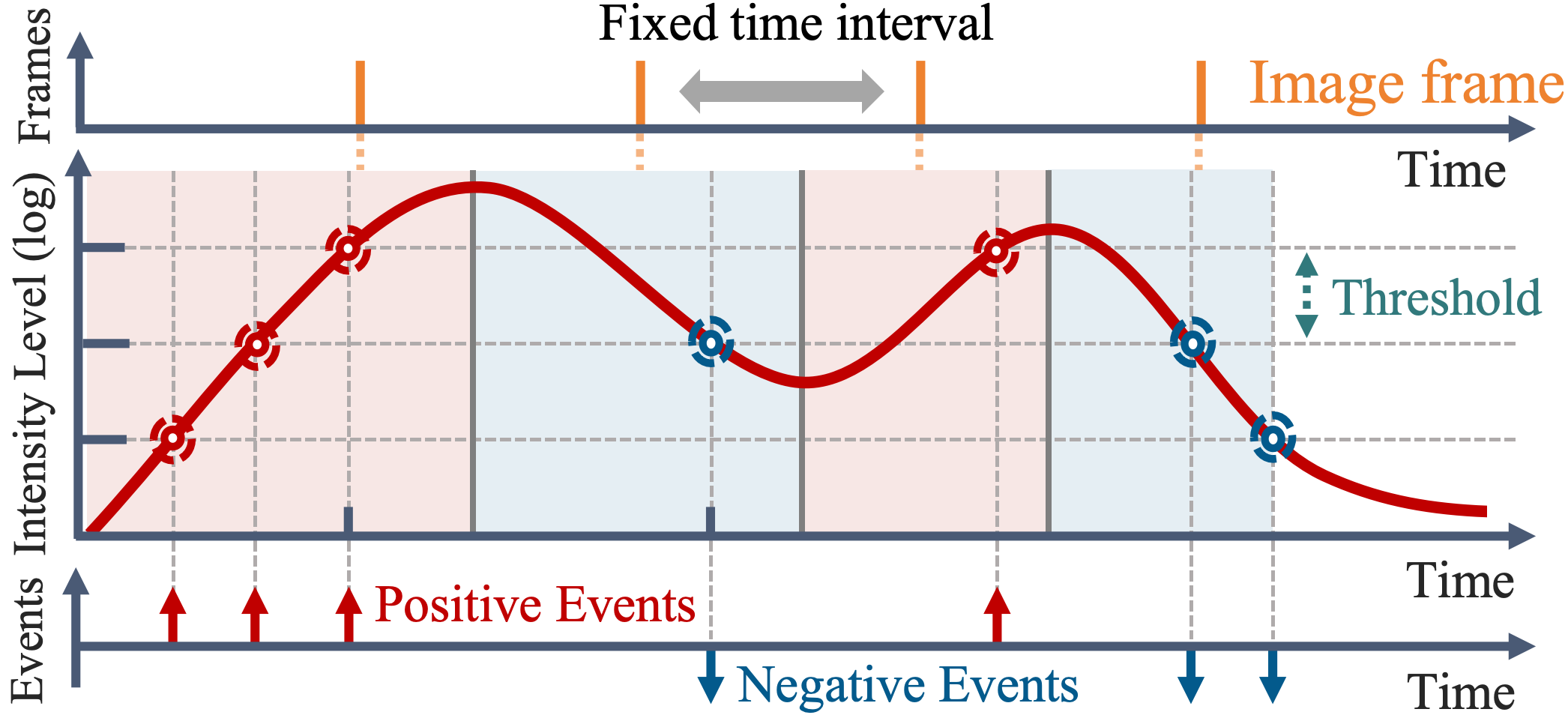
Event cameras are bio-inspired sensors that report pixel-wise intensity changes with ms-level resolution, capturing high-speed motions without blurring, ideal for fast-tracking tasks. Event cameras offer ms-level sampling latency, which harmonizes exceptionally with the high sampling frequencies of mmWave radar. Their 2D imaging capability also complements radars' limited spatial resolution, similar to how traditional frame cameras operate. Such temporal consistency and spatial complementarity across both modalities inspire us to upgrade frame cameras with event cameras to pair with radar for accurate and fast drone localization.